
 平台热线
平台热线



MotoSimEG-VRC安川机器人虚拟调试 第五节 点焊加走行轴
MotoSimEG-VRC仿真
安川机器人MotoSimEG-VRC仿真软件中,点焊焊钳动作是通过添加外部轴来控制的,具体操作步骤如下:
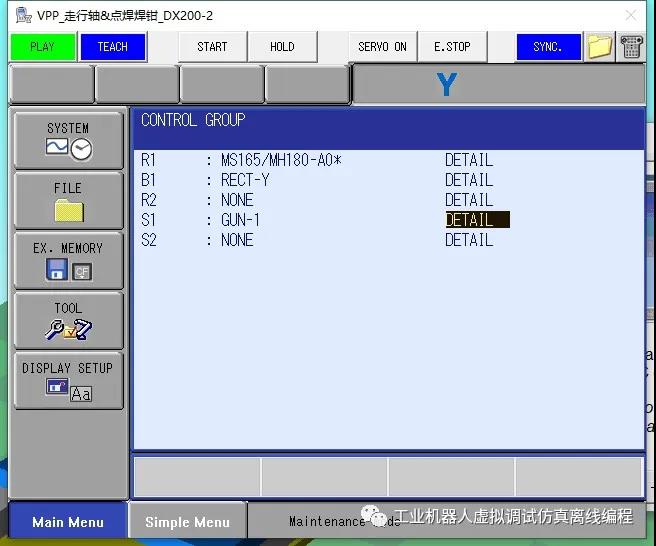
1、首先新建点焊机器人系统(选择点焊机器人MS165)、并添加走行轴B1(RECT-Y)、焊钳外部轴S1(GUN-1),如下图所示;
2、第二步导入走行轴、机器人底座、焊钳模型(分静臂和动臂两部分导入),放置到合适的位置和结构树目录下(本例中走行轴为仿真软件中绘制,仅示意);

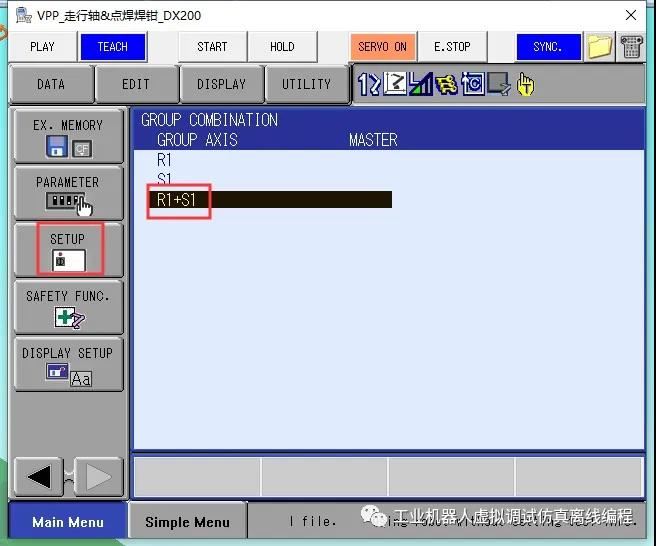
3、第三步创建机器人轴组R1+S1,如下图所示;
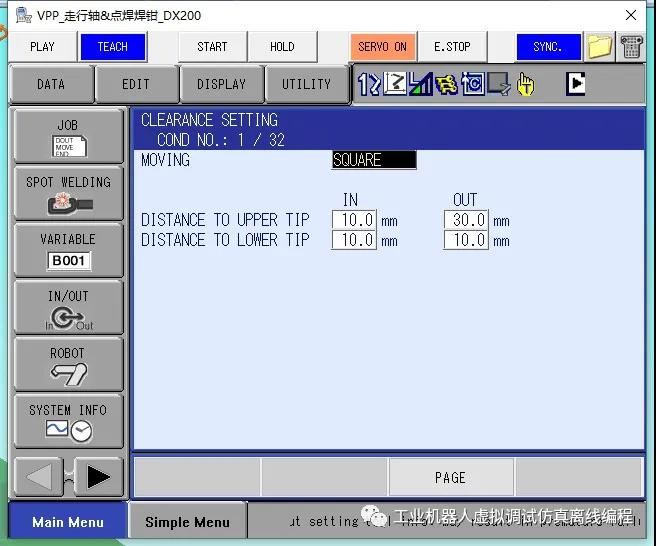
4、第四步设置焊钳参数,如下图所示;
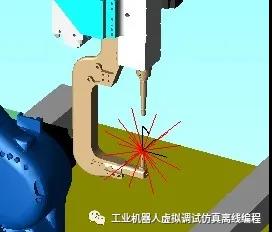
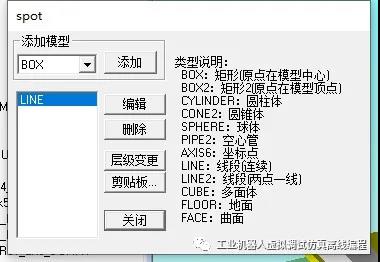
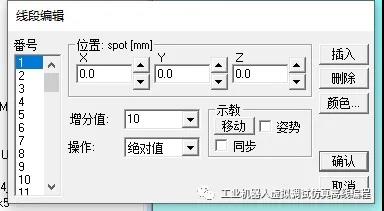
5、第五步,为了展示点焊焊接视觉效果,通过线条创建点焊效果示意点,当然这一步也可以不做,如下图;
6、第六步打开脚本编辑器对话框,创建脚本、添加IO信号(点焊效果示意点的显示和隐藏);
7、第七步新建机器人程式,选择R1+S1轴组,完成后示教机器人程式,添加点焊指令和IO信号,如下图所示;
8、试运行查看走行轴加点焊焊接效果,保存,完成。
