
 ƽ̨����
ƽ̨����



�����������������ϵͳ����ԭ������
������������ͬ���Ƕ��д��ԣ������˿���ϵͳ�ǻ����˵Ĵ��ԣ��Ǿ��������˹��ܺ����ܵ���Ҫ���ء�
��ҵ�����˿��Ƽ�������Ҫ������ǿ��ƹ�ҵ�������ڹ����ռ��е��˶�λ�á���̬�켣������˳������ʱ��ȡ����б�̼������˵��������Ѻõ��˻��������桢���߲�����ʾ��ʹ�÷�����ص㡣
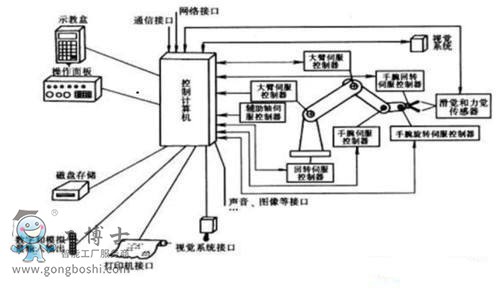
��ҵ�����˿���ϵͳ�����:
1�����Ƽ����������ϵͳ�ĵ���ָ�ӻ�����һ��Ϊ�ͻ�����������32λ��64λ�Ȫ��籼��ϵ��CPU�Լ���������CPU��
2��ʾ�̺У�ʾ�̻����˵Ĺ����켣�Ͳ����趨���Լ������˻�����������ӵ���Լ�������CPU�Լ��洢��Ԫ�����������֮���Դ���ͨ�ŷ�ʽʵ����Ϣ������
3��������壺�ɸ��ֲ���������״ָ̬ʾ�ƹ��ɣ�ֻ��ɻ������ܲ�����
4��Ӳ�̺����̴洢�棺�������˹����������Χ�洢����
5�����ֺ�ģ�����������������״̬�Ϳ������������������
6����ӡ���ӿڣ���¼��Ҫ����ĸ�����Ϣ��
7���������ӿڣ�������Ϣ���Զ���⣬ʵ�ֻ�������˳���ƣ�һ��Ϊ�������������Ӿ���������
8�������������ɻ����˸��ؽ�λ�á��ٶȺͼ��ٶȿ��ơ�
9�������豸���ƣ����ںͻ�������ϵĸ����豸���ƣ�����צ��λ���ȡ�
10��ͨ�Žӿڣ�ʵ�ֻ����˺������豸����Ϣ������һ���д��нӿڡ����нӿڵȡ�
11������ӿ�
12��Ethernet�ӿڣ���ͨ����̫��ʵ����̨��̨�����˵�ֱ��PCͨ�ţ����ݴ������ʸߴ�10Mbit/s����ֱ����PC����windows�⺯������Ӧ�ó�����֮��֧��TCP/IPͨ��Э�飬ͨ��Ethernet�ӿڽ����ݼ�����װ����������˿������С�
13��Fieldbus�ӿڣ�֧�ֶ������е��ֳ����߹����Devicenet��ABRemoteI/O��Interbus-s��profibus-DP��M-NET�ȡ�
�ؼ�����������
(1)��ģ�黯��λ��Ŀ���������ϵͳ������ϵͳ�����ڻ��ڿ�Դ��ʵʱ���������ϵͳlinux�ϣ����÷ֲ��ģ�黯�ṹ��ƣ���ʵ������ϵͳ�Ŀ����ԡ���������������ϵͳ��Ϊ������Σ�Ӳ�������㡢���IJ��Ӧ�ò㡣������ηֱ���Բ�ͬ�Ĺ�������Ӧ��ͬ��εĿ�����ϵͳ�и�������ڲ������ɸ�������Զ�����ģ����ɣ���Щ����ģ���Э����ͬʵ�ָò�����ṩ�Ĺ��ܡ�
(2)�����绯�����˿�������������ǰ�����˵�Ӧ�ù����ɵ�̨�����˹���վ������������߷�չ�������˿������������������Խ��Խ��Ҫ���������Ͼ��д��ڡ��ֳ�������̫�����������ܡ������ڻ����˿�����֮��ͻ����˿�����ͬ��λ����ͨѶ�����ڶԻ����������߽��м�ء���Ϻ�����
(3)�������˵Ĺ�������밲ȫά��������ͨ��������Ϣ���Ի����˹��Ͻ�����ϣ���������Ӧά�����DZ�֤�����˰�ȫ�ԵĹؼ�������
(4)��������ģ�黯�Ŀ���ϵͳ��ϵ�ṹ�����÷ֲ�ʽcpu������ṹ����Ϊ�����˿�����(rc)���˶�������(mc)��������i/o���ư塢������������ͱ��ʾ�̺еȡ������˿�����(rc)�ͱ��ʾ�̺�ͨ������/can���߽���ͨѶ�������˿�����(rc)�����������ɻ����˵��˶��滮���岹��λ���ŷ��Լ�������������i/o�������������ȹ��ܣ������ʾ�̺������Ϣ����ʾ�Ͱ��������롣
�˽����������������http://www.yaskawajxs.gbsrobot.com/
