平台热线
平台热线



安川机器人菜单中的工具一编辑和示教
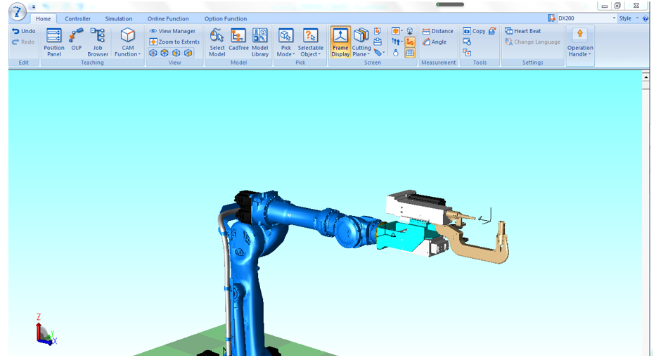
本节主要介绍MotoSimEG-VRC软件Home菜单中的工具是如何使用的,菜单如下图所示:
撤销当前和撤销后再恢复到上一步功能工具,如下图所示:
1) Undo撤销功能参数说明书:快捷键为“ALT+Backspace" ,功能为撤销当前的操作返回.上一步。
2) Redo恢复功能参数说明:快捷键为“CTRL+Y”,功能为恢复前一步的撤销。
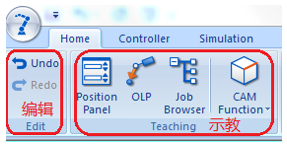
示教工具用于调试工业机器人的动作,如上图所示:
1) position panel位置面板:主要显示工业机器人的位置、位置脉冲数据等细节,也可以控制机器人的动作,相当于示教模式下,手动操作工业机器人,选择[ position panel]功能,弹出如右图的对话框。选择需要动作的工业机器人或外部轴,再选择动作的方式。动作操作区,机器人到达预想位置后,关闭。
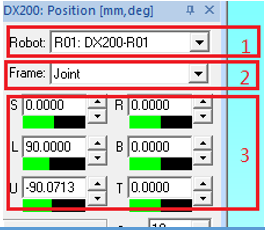

Position panel对话框参数如下所示:
1) Robot: 机器人名称,和CadTree中名称一致
2)frame:选择不同的模式来操作机器人的动作,有pulse脉冲、joint关节、tool 工具、use用户、 base世界、robot机 器人和workangles
3) Fix Tcp:固定TCP, 使动作操作区无效
4) Step:表示每次前进、后退的进展
5) Configuration:可看当前位置的坐标点.
6) Move Slave: 多机器人有效,联动,可选择一个机器人动,可以一 起动
7) SetFixTCP:设定固定的TCP在模型的哪个位置中
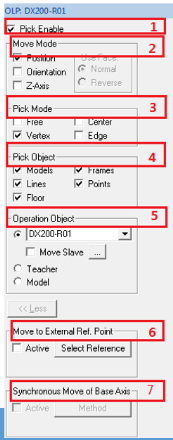
OLP:主要进行拾取操作,主要用于焊接找起始点和终点,模型转换位置等。
单击“OLP”功能,弹出对话框,此功能如左图所示: .
1)选择需要的,单击“pick enable" 拾取使能,只有在选择的情况下才可
以对选定的对象进行操作。
2)选择“move mode"移动方式,可选择正向或反向。默认正向。
3)选择“pickmode"拾取模式,但只能拾取机器人可以达到的位置。
4)选择“pick object"拾取对象,如模型的点、面、中点等。
5)选择需要移动的操作对象。
6)移动到外部参考点是否有效,可以选择某个模型。
7)基轴同步移动是否有效,可选择某种方式。
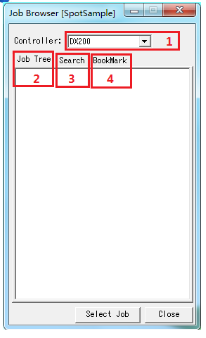
Job browser:单击程序浏览器,弹出对话框,如左图所示:
1)选择要查看的控制器程序。
2)单击“jobtree" ,示教的程序就会显示出程序名。
3)单击‘
search
”
搜索控制器有的程序,单击右键可以对程序进行添加
机器人的工作程序、添加备注等。
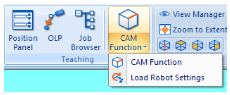
4)单击“bookmark”,给程序添加书签。单击“CAM function
”
,
弹出选项。
单击“load robot settings”载入机器人设置,等待载入完成。
单击“CAM Function”,弹出对话框,按对话框操作。
CAM: CAM是computer aided manufacturing的简称。CAM软件系统提供一种交互式编程并产生加
工轨迹的方法,它包括路径规划、工具设定、工艺参数设置等相关内容。.
无论是哪种形式的CAM软件,大都由五个模块组成,即交互工艺参数输入模块。工具轨迹
生成模块、工具轨迹编辑模块、三维加工动态仿真模块和后置处理模块。
CAM功能是示教工具中应用很多的功能。在motosim中, 焊接、喷涂以及打磨等应用中都会.
用到CAM功能。CAM功能如下图所示: