ЦНЬЈШШЯп
ЦНЬЈШШЯп



ЫљвддЕуаЃзММИИіЛљБОЕувЊРэЧхЃК
1ЁЂЪОНЬФЃЪНЃЛ
2ЁЂжСЩйгЕгаЙмРэШЈЯоЃЛ
3ЁЂЙиНкзјБъЯЕЯТНјааЁЃ
аЃзМВНжш
ЙигкШЋжсдЕуаЃзМ

дЕуЪ§ОнЖЊЪЇКѓМДЯдЪОЁА*ЁБ
1ЁЂбЁдёжїВЫЕЅжаЕФЁАЛњЦїШЫЁБВЫЕЅЃЌетЪБКђЛсЯдЪОГізгВЫЕЅЃЛ
2ЁЂбЁдёзгВЫЕЅжаЕФЁАдЕуЮЛжУЁБЃЛ
3ЁЂШчЙћЯжГЁЪЧЖрЛњЛђепЖрИіЭтВПжсЯЕЭГЃЌвЊбЁдёЖдгІжсзщЃЛ
4ЁЂбЁдёЁАБрМЁБВЫЕЅЃЌбЁдёЁАШЋВПжсЁБЃЌетЪБКђЛсЯдЪОШЗШЯЖдЛАПђЃЌбЁдёЁАЪЧЁБЁЃ
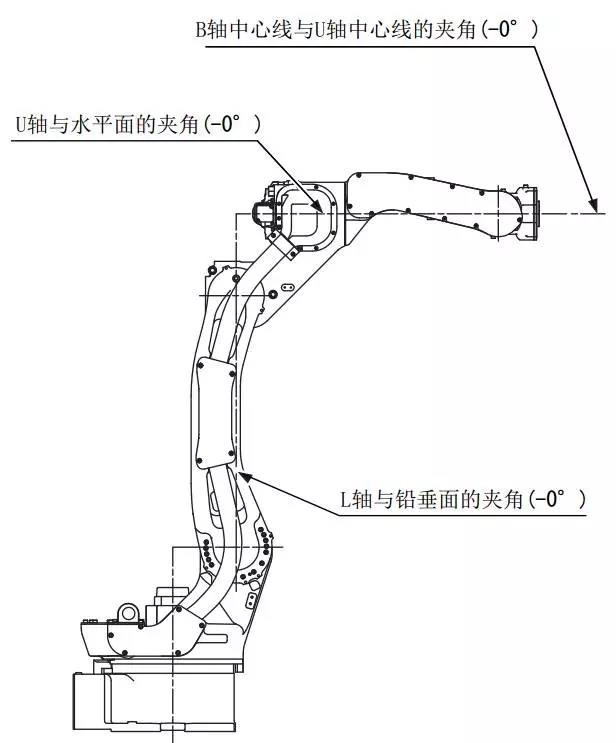
ЙигкЕЅжсЛђМИИіжсЕФдЕуЮЛжУаЃзМ

ЖЊЪЇдЕуЪ§ОнЕФЖдгІжсзщГіЯжЁА*ЁБ
1ЁЂбЁдёжїВЫЕЅжаЕФЁАЛњЦїШЫЁБВЫЕЅЃЌетЪБКђЛсЯдЪОГізгВЫЕЅЃЛ
АВДЈвЛПюаЁаЭЛњЦїШЫБъзМзЫЬЌЃЈЭМЃЉ
СЫНтИќЖрАВДЈЛњЦїШЫВњЦЗаХЯЂЃКhttp://www.yaskawajxs.gbsrobot.com
2ЁЂбЁдёзгВЫЕЅжаЕФЁАдЕуЮЛжУЁБЃЛ
3ЁЂШчЙћЯжГЁЪЧЖрЛњЛђепЖрИіЭтВПжсЯЕЭГЃЌвЊбЁдёЖдгІжсзщЃЛ
4ЁЂИїжсЕЅЖРЕЧТНдЕуЮЛжУЃЌНЋЙтБъвЦЖЏЖдгІжсзщЃЌАДЁАбЁдёЁБМќЃЌМДЯдЪОШЗШЯЖдЛАПђЃЌбЁдёЁАЪЧЁБМДПЩЁЃ