
 ЦНЬЈШШЯп
ЦНЬЈШШЯп



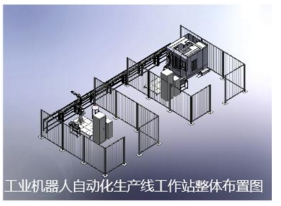
АВДЈЛњЦїШЫЩЯЯТСЯЙЄзїСїГЬ
(1) ЕБдигаД§МгЙЄЙЄМўЕФЭаХЬЪфЫЭЕНЩЯСЯЮЛжУКѓЃЌЛњЦїШЫНЋЙЄМўАсдЫЕНЪ§ПиЛњДВЕФМгЙЄЬЈЩЯЁЃ
(2) Ъ§ПиЛњДВНјааМгЙЄЁЃ
(3) МгЙЄЭъГЩЃЌЛњЦїШЫНЋЙЄМўАсдЫЕНЪфЫЭЯпЩЯСЯЮЛжУЕФЭаХЬЩЯЁЃ
(4) ЩЯСЯЪфЫЭЯпНЋдигавбМгЙЄЙЄМўЕФЭаХЬЯђзАХфЙЄзїеОЪфЫЭЁЃ

ЕБПеЭаХЬЗХжУдкЪфЫЭЯпЕФЦ№ЪМЮЛжУЃЈЭаХЬЮЛжУ1ЃЉЪБЃЌЭаХЬМьВтЙтЕчДЋИаЦїМьВтЕНЭаХЬЃЌЦєЖЏжБСїМѕЫйЕчЛњКЭЫХЗўЕчЛњЃЌ3НкЪфЫЭЯпЭЌЪБдЫааЃЌНЋЭаХЬЯђЙЄМўЩЯСЯЮЛжУЁАЭаХЬЮЛжУ2ЁБДІЪфЫЭЁЃ
ЕБПеЭаХЬДяЕНЩЯСЯЮЛжУЃЈЭаХЬЮЛжУ2ЃЉЪБЃЌБЛзшЕВЕчДХЬњЕВзЁЃЌЭЌЪБЭаХЬМьВтЙтЕчДЋИаЦїМьВтЕНЭаХЬЃЌжБСїЕчЛњгыЫХЗўЕчЛњЭЃжЙЁЃЕШД§ЛњЦїШЫНЋЙЄМўАсдЫжСCNCЛњДВНјааМгЙЄЃЌдйНЋМгЙЄЭъГЩЕФЙЄМўАсдЫЕНЭаХЬЩЯЁЃ
ЕБЛњЦїШЫНЋЙЄМўАсдЫЕНЭаХЬЩЯКѓЃЌЕчДХЬњЕУЕчЃЌЕВЬњЫѕЛиЃЌЫХЗўЕчЛњЦєЖЏЃЌЙЄМўЩЯЯТСЯЪфЫЭЯп2КЭЙЄМўЩЯЯТСЯЪфЫЭЯп3дЫааЃЌНЋзАгаЙЄМўЕФЭаХЬЯђзАХфЙЄзїеОЪфЫЭЁЃ
СЫНтИќЖрАВДЈЛњЦїШЫВњЦЗЃКhttp://www.yaskawajxs.gbsrobot.com
